Reference Language | Libraries | Comparison | Changes
digitalRead()
Description
Reads the digital value one the defined port. These are exposed as TinkerKit connectors on the robot. See the diagrams below for pin locations
Syntax
Robot.digitalRead(portName)
Parameters
port: Valid names are TK0 to TK7 (found on the Control board), TKD0 to TKD5 (on the Control board), and B_TK1 to B_TK4 (on the Motor Board).
Returns
Examples
#include <ArduinoRobot.h>
void setup(){
Robot.begin();
Serial.begin(9600);
}
void loop(){
Serial.println(Robot.digitalRead(TK0)); //Print the value read on port TK0
delay(100);
}
void setup(){
Robot.begin();
Serial.begin(9600);
}
void loop(){
Serial.println(Robot.digitalRead(TK0)); //Print the value read on port TK0
delay(100);
}
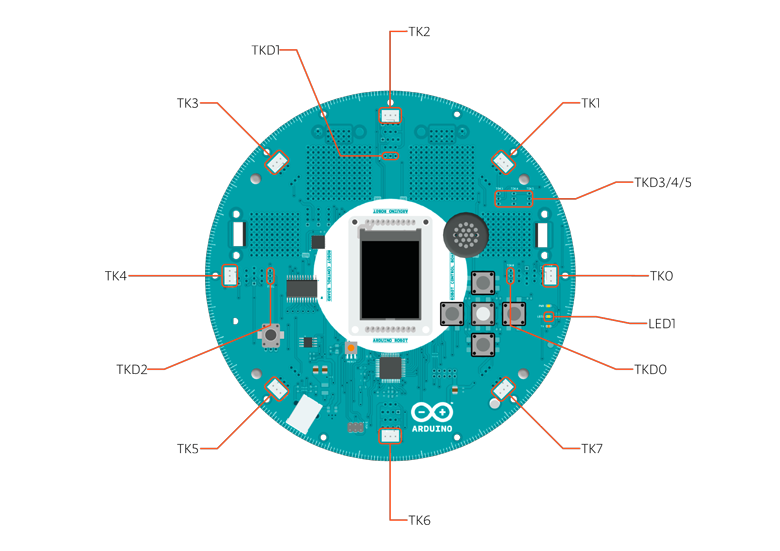
Control Board
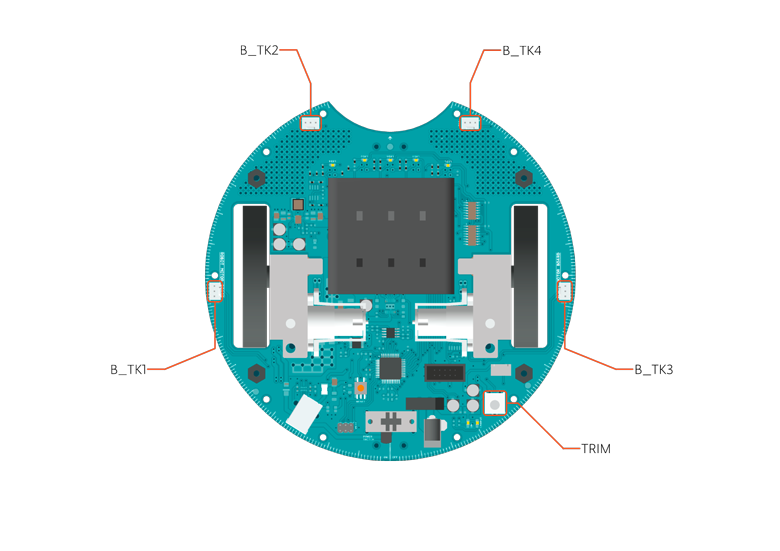
Motor Board
See also
Corrections, suggestions, and new documentation should be posted to the Forum.
The text of the Arduino reference is licensed under a Creative Commons Attribution-ShareAlike 3.0 License. Code samples in the reference are released into the public domain.
Share








