Reference Language | Libraries | Comparison | Changes
analogRead()
Description
Reads the value from the specified port on the robot. The ports are exposed on the robot as TinkerKit connectors.
The board has a 10-bit analog to digital converter. This means that it will map input voltages between 0 and 5 volts into integer values between 0 and 1023.
Syntax
Robot.analogRead(port)
Parameters
port: TK0 to TK7 (found on the Control Board), TKD0 to TKD5 (found on the Control Board), or B_TK1 to B_TK4 (found on the motor Board)
Returns
int : 0 to 1023
Note
If the input port is not connected to anything, the value returned by Robot.analogRead() will fluctuate based on a number of factors (e.g. the values of the other analog inputs, how close your hand is to the board, etc.).
Examples
void setup(){
Robot.begin();
Serial.begin(9600);
}
void loop(){
Serial.println(Robot.analogRead(TK0)); //Print the value on port TK0
delay(100);
}
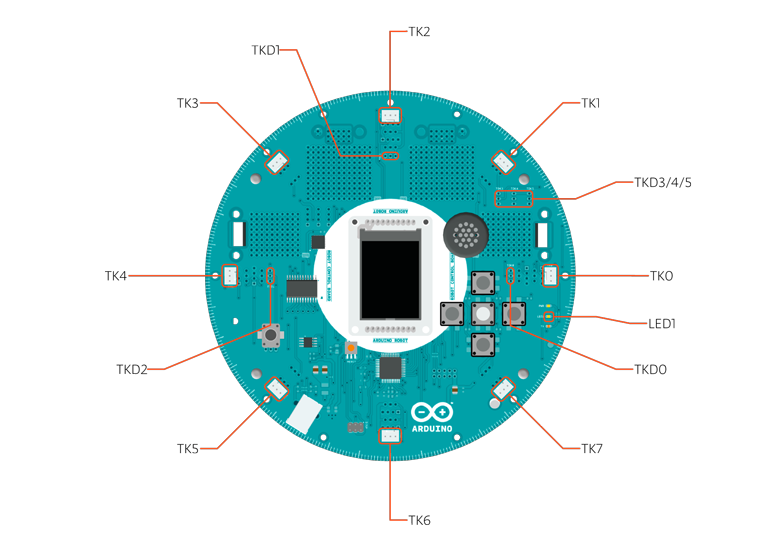
Robot Control Board
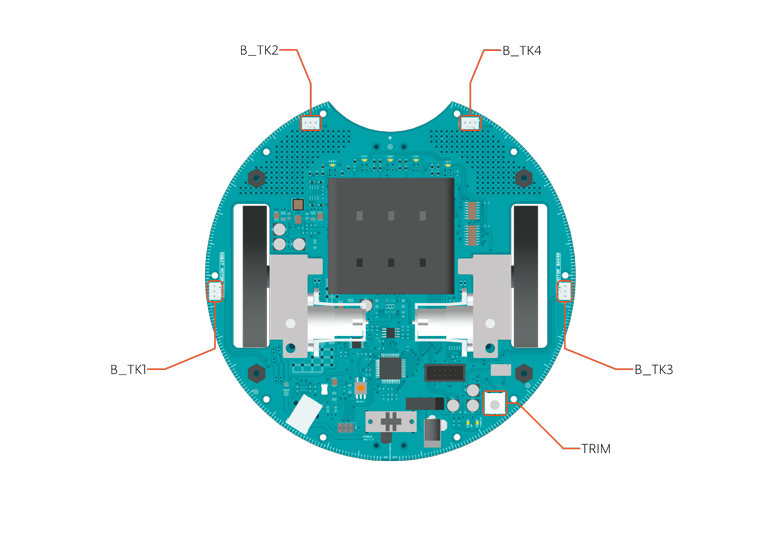
Robot Motor Board
See also
Corrections, suggestions, and new documentation should be posted to the Forum.
The text of the Arduino reference is licensed under a Creative Commons Attribution-ShareAlike 3.0 License. Code samples in the reference are released into the public domain.
Share








