Reference Language | Libraries | Comparison | Changes
digitalWrite()
Description
Write a HIGH or a LOW value to the defined port on the robot. the ports are exposed on the robot as TinkerKit connectors.
Syntax
Robot.digitalWrite(port, value)
Parameters
port: TKD0 to TKD5 (on the Control board), B_TK1 to B_TK4(on the Motor Board), or LED1 (located on the control board)
Returns
none
Examples
#include <ArduinoRobot.h>
void setup(){
Robot.begin();
}
void loop(){
Robot.digitalWrite(TDK0, HIGH); // Turn on a Tinkerkit LED connected to TDK0
delay(1000);
Robot.digitalWrite(TK0, LOW); // Turn the LED off
delay(1000);
}
void setup(){
Robot.begin();
}
void loop(){
Robot.digitalWrite(TDK0, HIGH); // Turn on a Tinkerkit LED connected to TDK0
delay(1000);
Robot.digitalWrite(TK0, LOW); // Turn the LED off
delay(1000);
}
Note
You cannot call Robot.digitalWrite() on TK0 to TK7
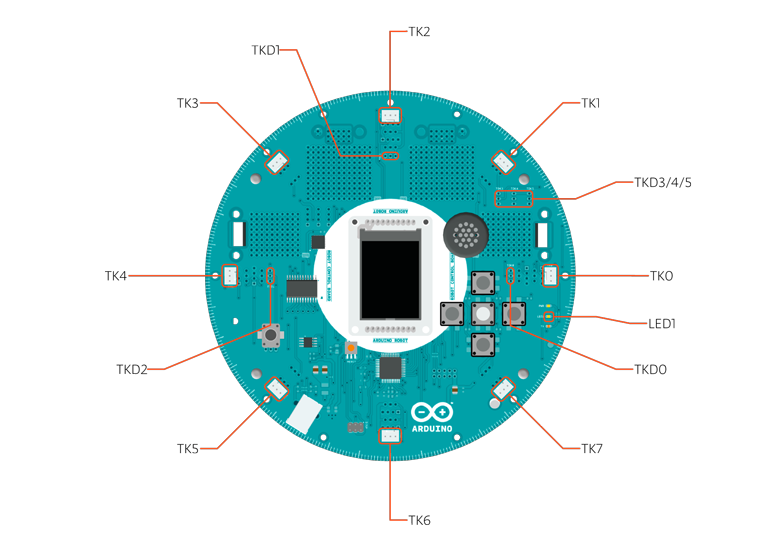
Control Board
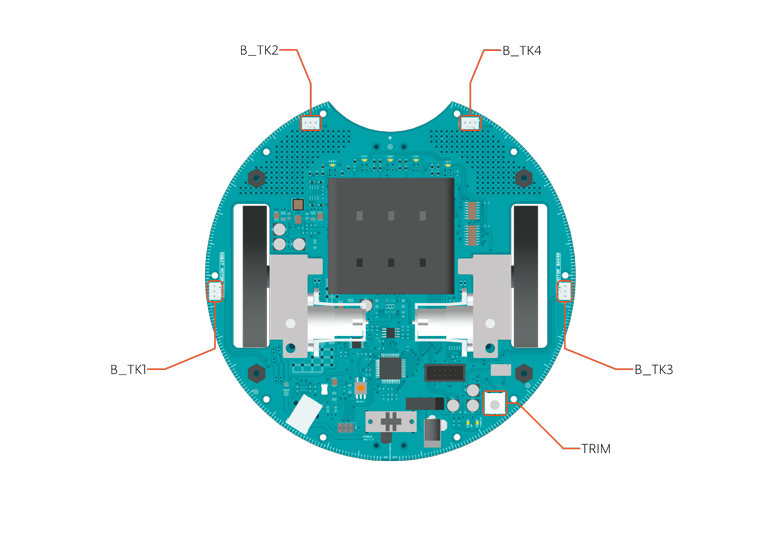
Motor Board
See also
Corrections, suggestions, and new documentation should be posted to the Forum.
The text of the Arduino reference is licensed under a Creative Commons Attribution-ShareAlike 3.0 License. Code samples in the reference are released into the public domain.
Share








